|
I am a PhD student advised by Dhruv Shah at Princeton University. I am building generalist robots in the real world. |
|
|
|
|
|
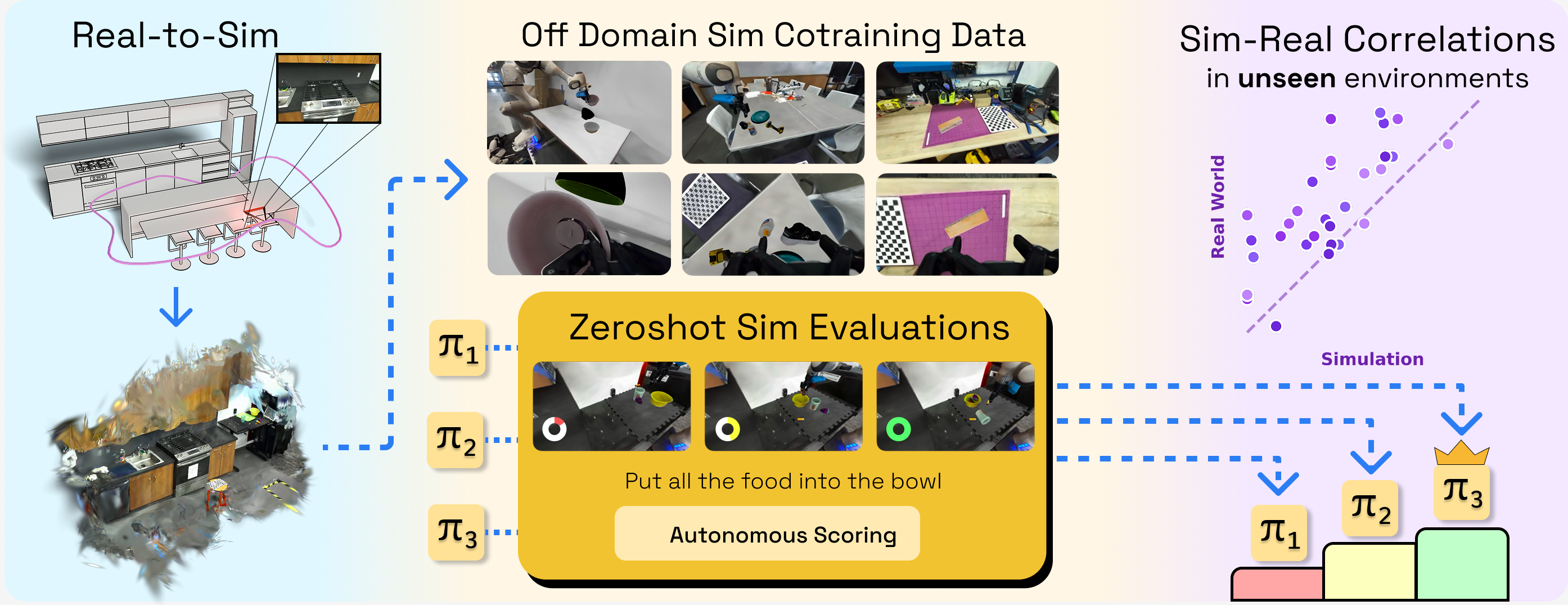
Arhan Jain*, Mingtong Zhang* , Kanav Arora, William Chen, Marcel Torne, Muhammad Zubair Irshad, Sergey Zakharov, Yue Wang, Sergey Levine, Chelsea Finn, Wei-Chiu Ma, Dhruv Shah, Abhishek Gupta†, Karl Pertsch† [Website] [Paper] [Code] |
|
Mingtong Zhang* , Kaifeng Zhang*, Yunzhu Li Conference on Robot Learning (CoRL), 2024 [Website] [Paper] [Code] [Demo] |
|
|
Yixuan Wang*, Mingtong Zhang* , Zhuoran Li*, Tarik Kelestemur, Katherine Driggs-Campbell, Jiajun Wu, Li Fei-Fei, Yunzhu Li Conference on Robot Learning (CoRL), 2024 Oral [Website] [Paper] [Code] |
|
|
Zixian Liu*, Mingtong Zhang* , Yunzhu Li Conference on Robot Learning (CoRL), 2024 @ LangRob Spotlight International Conference on Robotics and Automation (ICRA), 2025 [Website] [Paper] [Code] |
|
|
Open X-Embodiment Collaboration International Conference on Robotics and Automation (ICRA), 2024 Best Paper Award [Project] [Paper] [Blogpost] [Code] [Data] |
|
|
Template adapted from Jon Barron. |